
|
|
|
Pathfinder (1996-1998) Pioneer | Mariner | Viking | Voyager | Magellan | Pathfinder | Galileo | Mars Global Surveyor
Overview Fifteen years after the last Viking lander communicated with Earth, the next Mars probe, NASA's Pathfinder (previously called the Mars Environmental Survey (MESUR)), landed on Mars with its little rover, Sojourner. It was the second of NASA's low-cost planetary Discovery missions. The primary objective was to demonstrate the feasibility of low-cost landings on and exploration of the Martian surface. It was met by tests of communication between the rover and lander, lander and Earth, and tests of the imaging equipment and sensors.
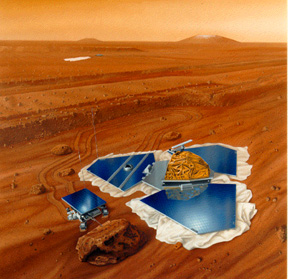
The Mars Pathfinder mission cost approximately $265 million including launch and operations. Development and construction of the lander cost $150 million and the rover about $25 million. Mission The Mars Pathfinder probe began its journey on December 4, 1996, at 06:58:00 UTC. Its hyperbolic path to Mars lasted seven months, and the craft entered the Martian atmosphere at a speed of 7300 m/s on July 4, 1997. The particulars to its landing sequence were the first such attempted, and are very much worth discussion: The part of the craft that was just useful in its space cruise was jettisoned about 30 minutes before anticipated landing. The entry part's heat shield took 2 min 40 sec to slow the lander to 400 m/s, at which time a 12.5 m parachute was deployed, which slowed the craft to a leisurely 70 m/s. 20 seconds later, the heat shield was released, and a bridle - a 20 m long braided Kevlar tether - was deployed below the spacecraft. At this time, the lander separated from the backshell and slid down to the bottom of the bridle, taking about 25 seconds to do so. When the craft was 1.6 km from the ground, the radar altimeter was used to determine distance above the surface. About 10 seconds before the landing, four air bags inflated in 0.3 seconds which formed a 5.2 meter diameter protective bubble around the lander. 4 seconds later, the craft was 98 m above the surface and three solid rockets that were mounted in the backshell fired to slow the descent even more, and 2 seconds later the bridle was cut 21.5 m above the ground, releasing the bubble and lander. The lander fell to the ground 3.8 seconds later and impacted at 16:56:55 UT at a velocity of 16 m/s (14 m/s vertical and 12 m/s horizontal). It bounced about 12 m (40 ft) into the air, and proceeded to bounce at least 15 more times before it rolled to a stop, approximately 2 min 30 sec after impact and 1 km from the initial impact site. It settled in Ares Villis at 19.33° N, 33.55° W - a large washout plain near Chryse Planitia. It was three hours before the Martian sunrise when it landed. The probe deflated the air bags, then opened up like a flower - each of the three "petals" being a solar panel to generate power - 87 min after landing. Finally, it broadcast a signal to Earth that contained the data that it collected during entry and landing at 18:34 UT. The lander's cameras were used to view the rover and immediate surroundings, transmitting the data to Earth at 23:30 UT.
Though the bulk of the lander's task was to support the rover by imaging rover operations and relaying data from the rover to Earth, the lander was also equipped with a meteorology station and a few other experiments (see the section below - Experiment Summary). Over 2.5 meters of solar cells on the lander petals, in combination with rechargeable batteries, powered the lander. The main lander components are held in a tetrahedral-shaped unit in the center of the three petals, with three low-gain antennas extending from three corners of the box and a camera extending up from the center on a 0.8 m high pop-up mast. The rover, Sojourner, contained an on-board camera with which it could relay signals back to the base and then have them relayed to Earth. If scientists wanted Sojourner to explore a particular part of the region, then they signaled it through the base. There was a time delay of 7-22 minutes because the distance between Mars and Earth is so large. To maneuver, Sojourner used laser beams much as an insect uses feelers, and if confronted with an obstacle, it would just keep bumping into it until it got across. Sojourner's main purpose was to determine the chemical composition of Martian rocks, looking for carbonous compounds which could indicate life. One discovery that the Pathfinder made, combined with data from the Viking crafts, is that Mars has a crust, mantle, and core, with the heavier elements nearer to the center. Such a structure had been guessed at, but now scientists have direct evidence of such layering. A discovery that Sojourner made (early August 1997) was finding evidence that winds up to 200 kph (125 mph) used to blow across the local region. Evidence was found when examining rocks and finding that they had been sandblasted in several places. Such sand blasting could have only been formed by fast winds whipping sand around. Pathfinder's last transmission to Earth was on September 27, 1997. Ground receivers have not heard routine signals since October 6, 1997. After a month of attempted contact, NASA stopped on November 4, 1997. NASA now believes that its batteries have died, two months after its 30-day expected life. Without batteries to keep it warm, the craft probably stopped functioning. Sojourner, programmed to return to Pathfinder if no signal has been received for five days, probably returned to it. The last attempt to contact the craft was March 10, 1998, at 16:21 EST. The site has since been named the Carl Sagan Memorial. Imager for Mars Pathfinder (IMP) - Pathfinder Lander
The stereoscopic system consists of 2 eyes covered by fused silica windows separated by 15.0 cm backed by two fold mirrors with one filter wheel and a set of three lenses in each optical path with a fold prism to place the images side-by-side on the CCD focal plane. The two filter wheels contain 24 filters total: fifteen are optimized for Mars geology (four for stereo geology), eight filters for atmospheric and solar studies including four solar filters, and one magnifying diopter filter. The spectral range is 440-1000 nm. The spectral channels are particularly sensitive to iron and pyroxene minerals. The CCD is a front-illuminated frame transfer array with 23 µm square pixels in two square 256x256 pixel frames. Each pixel has an instantaneous field of view of 0.98 milliradian. The signal-to-noise ratio is 350 and both lossy and lossless compressions were used to store and transmit images. The imager returned 16,661 images, including frames to produce 360° panoramas of the landing site. The camera was used for science experiments, including filter-wheel spectral mapping of the landing site to determine the mineralogy of rocks and soil and to identify rocks as targets for further investigation. Spectral mapping was also used to study weathering processes and products in the dust, soil, and rocks of Mars. Images were taken of the surface to study phenomena which occur over time, such as deposition, dune formation and seasonal changes. Images were also taken of the sky, clouds, sun, Phobos, Deimos, some stars, and calibration targets on the lander. Frequent images were taken of the rover to support its operations. Two other investigations were associated with the imager. The magnetic properties experiment consisting of five magnets of different strengths was mounted on the lander. Over the course of the mission, images were taken of these magnets to study the accumulation of dust. A wind experiment consisting of three small wind socks mounted on a mast were also the targets of the imager on a regular basis. Atmospheric Structure Instrument / Meteorology Package (ASI/MET) - Pathfinder Lander This was designed to study the atmospheric structure of Mars as the lander descended and the meteorological conditions at the surface after landing. During the entry, the data collected by the instruments from above 100 km altitude down to the surface allowed reconstruction of profiles of the atmospheric density, temperature, and pressure. On the ground, the meteorology package collected temperature, pressure, and wind data for use in the study and characterization of diurnal and longer term variations of the atmosphere. The ASI/MET consisted of an accelerometer and temperature, pressure and wind sensors. The accelerometer is a redundant set of x-, y-, and z- axis sensors. Several gain states, ranging over 0.016 g, 0.8 g, and 40 g (g equals one Earth gravity) were available to cover the wide dynamic range from atmospheric entry to deceleration and landing. The maximum sensitivity along each axis was 20 µm/s2. The accelerometer data is used to determine the density profile of the martian atmosphere. The pressure sensor was a Tavis magnetic reluctance diaphragm sensor (similar to that used by Viking). This instrument was used to measure pressure during the descent and after landing. The sensor was exposed to the atmosphere via a 1 m inlet tube during parachute descent and after landing. The measurements have a sensitivity of 0.25 µbar. Temperature was measured during the descent by a thin wire thermocouple. The sampling frequency of the sensors during descent is governed by the velocity of the lander. After landing, a 1.1 m high mast was deployed. Three more thin wire thermocouples are mounted on the mast at heights of 25, 50 and 100 cm above the surface, to monitor atmospheric temperature at these heights. This information is necessary to understand the near-surface atmospheric temperature gradient and heat flux. The thermocouples had sensitivities of 0.01 K and time constants of 1 to 2 sec. The wind sensor consisted of six hot wire elements distributed uniformly about the top of the mast. Wind speed and direction 1.1 m above the surface are derived from the temperatures of these elements. The meteorology instruments were connected to an electronics board which controlled operations and data output digitizing. The instruments recorded data throughout the descent until about 1 minute after impact at 03:00 local solar time (LST) except for the entry pressure measurements, terminated at 0.3 km altitude by the inflation of the airbags, and the entry deceleration measurements, terminated at 0.1 km altitude by the descent rocket firing. Regular surface measurements by the MET began at 07:00 LST and the MET mast was deployed at 13:30 LST. Over the 30 day primary mission, 51 3-min measurement sessions were performed each martian day (sol), equally spaced in time. There were also 15 minute and one hour sessions of 1 second sampling, and on sol 25 a full-day session of continuous sampling at 4-second intervals was performed. Some sampling was missed during the first 30 sols due to computer resets and problems with the MET software. The ASI/MET instrument found lower temperatures and densities in the upper atmosphere during descent than the Viking 1 lander, possibly due primarily to the Viking 1 descent being in the local late afternoon as opposed to the early morning for Pathfinder. Density and temperature in the lower atmosphere were similar for the two craft. After Pathfinder landed at 19.33° N, 33.55° E at 3389.7 km from the center of Mars during local mid-summer, the measurements showed evidence of 0.2 to 0.3 mbar daily variations indicating strong thermal tides and daily cycles showed two minima and two maxima. The temperatures were consistent from day to day, showing a maximum at the top mast thermocouple of approximately 263 K at 14:15 LST and a minimum of 197 K at 5:15 LST. Wind measurements showed the wind direction on a typical sol would be from the south at night and early morning and rotate slowly through west, north and east over the day. Possible evidence of ground fogs and dust devils was also detected. Wind Sock Investigation - Pathfinder Lander This experiment was associated with both the ASI/MET and the Imager for Mars Pathfinder. The experiment was comprised of three wind socks mounted on the one meter tall ASI/MET mast. Each wind sock is a 10 cm long, 3 cm wide hollow aluminum cone attached to a pivot near the narrow end and an aluminum sheathed steel counterweight. The wind socks are mounted on the ASI/MET mast at heights of 33.1 cm, 62.4 cm, and 91.6 cm above the base of the mast. They were imaged by the lander camera, and their orientations and tilts gave information on the wind speed and direction at each of the three heights. The variation in wind speed with height was used to study the effect of the surface on the wind and to estimate the aerodynamic roughness of the surface near the landing site. This knowledge will help understand how dust and sand is lifted into the atmosphere and deposited. Aerodynamic calibrations of the wind socks were done at ASU's low pressure wind tunnel at NASA Ames Research Center at Mars equivalent pressures. Roughly 650 calibration images were taken. Magnetic Properties Investigation - Pathfinder Lander This experiment was designed to study the magnetic composition of the martian dust and soil. The experiment consists of three distinct investigations, each involving the use of magnets which capture wind-blown dust and saltating soil grains containing ferro-magnetic materials. The type of magnetic materials found on Mars can provide information on whether the material was formed in an environment with abundant water or not. The first investigation, the magnet array experiment, consists of two arrays each containing 5 magnets of varying strengths. As wind blows dust over the array, dust containing ferromagnetic material would stick to the magnets. The Mars Pathfinder camera photographed the magnetic arrays periodically through 9 optical filters and the amount of dust collected as a function of time and magnet strength can be studied. One array is mounted close to the ground so as to capture saltating sand grains, the other mounted higher so as to only attract wind-borne dust. Each magnet array consists of two blocks of magnesium, one block carrying two magnets with average surface magnetic field strengths of 280 and 70 milliTesla (mT) (similar to those used on the Viking Landers), and another block carrying 3 weaker magnets of 49, 23, and 11 mT. The mean surface magnetic field gradients (the attractive magnetic force) of the magnets are, respectively, 130, 45, 21, 11, and 5 T/m. When mounted, the magnets are completely covered by magnesium. Each magnet in the array is an annular ring magnet, 18 mm in diameter, surrounding a central cylindrical magnet, in order to produce a bulls eye pattern of attracted dust. By observing on which magnets the dust adheres, one is able to deduct some essential magnetic properties of the dust (e.g. the saturation magnetization). The images taken through the 9 optical filters in the visible and near-infrared will allow reflection spectra of the dust to be determined. This data may give information on the identity of the minerals in the dust, in particular those responsible for the magnetization of the Martian soil. After 68 sols, the images showed clear bulls-eye patterns on the 3 strongest magnets and a discernable pattern on magnet 4. This would indicate ferric oxide, at least some of which is probably maghemite, indicating formation in liquid water. Alternatively, the particles could be titanomanetite which would not require water. The tip plate magnet investigation consists of a single cylindrical SmCo magnet embedded in magnesium and situated about 10 cm from the Mars Pathfinder Lander camera eye. The magnet is constructed so that the magnetic field (B) and the magnetic field gradient (NB) varies across the surface of the magnet - the highest strength (B=0.25 T, NB=130 T/m) corresponding to the strongest magnet used on the Viking Landers. The outer diameter of the magnet is 18 mm, and the magnet is located about 1.3 m above the surface, where it will attract any wind-borne dust which blows over it through time. The magnet is imaged through the diopter lens of the lander camera with a resolution of about 140 pixels per 18 mm. The high resolution makes it possible to determine if the magnetic grains are aligned in chains or not. A chain structure indicates the grains are primarily single phase magnetic particles with a substantial magnetization. Multiphase particles - or superparamagnetic particles - will generally not form chains. The lander also carries two ramp magnets which are attached to the ends of the two rover deployment ramps. The ramp magnets cover a 10 cm by 10 cm area and are made of magnetic lamellae of a width of 4 mm and a length of 96 mm. The magnetic lamellae are covered with a layer of aluminized mylar that also covers the voids between the lamellae. When the ramp is deployed, each ramp magnet forms a plane magnetized surface at the very end of the ramp next to the surface where saltating grains and wind blown dust containing ferro-magnetic material would stick to them. After the magnets had had time to collect a sufficient layer of magnetic dust and soil, the Mars Pathfinder Rover was planned to drive up and deploy the Alpha-Proton-X-ray Spectrometer (APXS) to determine the composition of the collected dust, but this procedure was not done before loss of contact. This would have allowed a comparison with the typical dust and soil analyzed on the surface by the APXS, and given information on the type of ferro-magnetic material that exists on Mars. Radio Science: Celestial Mechanics - Pathfinder Lander This experiment was used to study the orbits of Earth and Mars and the rotation of Mars through Earth-based radio tracking of the Pathfinder lander. The X-band (8 GHz) radio direct-to-Earth transmissions from the Pathfinder lander were used to obtain precise range and Doppler measurements from Earth, giving the relative position and motion of the lander on the surface of Mars. This data provided precise information on the relative orbital positions of Earth and Mars and on the rotation of Mars, in particular the secular precession of the longitude of the node, the short period nutation of the obliquity and the node, seasonal and tidal variations in the length of day and the polar motion or wobble of the figure axis and spin axis. This information will improve the accuracy of the value of the polar moment of inertia which in turn will yield information on the internal structure and composition of Mars and the possible size of the core. Preliminary results from the experiment show that Mars may have a solid iron core with a radius of about 1300 km or more, or a mixed iron and sulfur core about 2000 km in radius. Alpha Proton X-Ray Spectrometer (APXS) - Sojourner Rover This was designed to measure the elemental chemistry of Martian surface material to help gain a more detailed understanding of the geologic and geochemical processes taking place within Mars and on the surface and to allow inferences as to the role played by reactions with the atmosphere and water. The instrument consists of a sensor head which was placed against a sample by a deployment mechanism mounted on the rover chassis. The sensor head was placed on a sample (rock or soil) for a period of 10 hours. It would then be moved to a different sample for another measurement. A color imager mounted on the back of the rover took pictures of all the samples studied. Six soil sites and five rocks were analyzed by the APXS. The soil samples are compositionally similar to soils measured by the Viking landers, although slightly elevated in titanium and lower in sulfur. The analyzed rocks appeared to be compositionally similar to one another once the effects of dust were removed. They were high in silica and potassium and low in magnesium compared to the soils and are similar to terrestrial andesites in composition. Rover Imaging Cameras - Sojourner Rover The rover was equipped with two forward black and white cameras and one rear color camera. The cameras were used for close-up imaging of rock samples and soil, viewing the lander from different perspectives, imaging areas out of the field of view of the lander cameras, imaging results of rover abrasion tests and other experiments, and aiding in navigation and obstacle avoidance. The primary scientific objectives were to image the sites onto which the APXS instrument was deployed to assist in interpretation of the APXS results, use close-up images of rocks and soils to understand the textures and small scale features, and provide high-resolution views of the rover tracks and abrasion marks to infer material properties of the soil and rocks. The black and white cameras are mounted in a fixed position on the front of the rover, separated horizontally to provide stereo coverage. Each camera is boresighted straight ahead but directed 22.5° below horizontal to view the ground in front of the rover. Each camera has a mass of about 40 grams and is composed of a very wide angle 4 mm lens which focused the image onto a CCD array. The wide-angle distortion was corrected by image processing on the ground. The field of view for each camera is 127.5° horizontal by 94.5° vertical. The CCD is a 768x484 pixel array made up of rectangular elements with resolution of 2.9 mradian/pixel horizontal and 3.4 mradian/pixel vertical. The color camera is mounted in a fixed position on the rear of the rover. Like the black and white cameras, it weighs about 40 grams and consists of a 4 mm wide-angle lens and a CCD array. The CCD array has the same specifications as for the black and white cameras, except the camera is oriented so that the long dimension of the field of view is vertical instead of horizontal and the boresight angle is 40° below horizontal. This gives a view of the APXS instrument and a rear wheel. Each pixel of the CCD has an individual red, green, or blue color mask to produce the color pictures. Materials Adherence Experiment (MAE) - Sojourner Rover The objective of this experiment was to determine the rate of dust deposition at the surface of Mars. The rate of deposition is an important quantity in the evaluation of the use of solar cells for long-term missions on Mars because dust covering will affect the performance of the solar cells. Knowing the rate of deposition can also give information on models of atmospheric transport of dust and the role of dust storms in global mass transport. The MAE is mounted on the front left corner of the rover, covering an area of about 12 cm2. It consists of two distinct detectors -- a solar cell sensor and a quartz crystal monitor (QCM). Wheel Abrasion Experiment (WAE) - Sojourner Rover This experiment was designed to study the abrasive wear of the martian soil on various types of metals attached to one of the rover wheels. The experiment consisted of thin (200-1000 Å) films of aluminum, nickel, and platinum over black anodized aluminum strips attached to the center of the tread of the middle left rover wheel. Film reflectivity was measured over time by a photovoltaic sensor. Changes in reflectivity indicate the amount of abrasion on the different films due to rolling wear. At time,s all other wheels were locked and only the abrasion wheel was spun in the regolith, providing a test of wear under harsher conditions. Wear characteristics indicate the types of soils encountered by the rover wheels. This information, combined with terrestrial ground simulations, may allow a determination of the types of materials comprising the Martian regolith. Craft Data
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 On
the scientific end, the purpose was to study the atmosphere as the probe fell,
image close- and long-range targets on the surface, and a general characterization
of the Martian environment for later exploration. Useful science of Mars was
conducted until September 27, 1997, when communication from the lander stopped.
On
the scientific end, the purpose was to study the atmosphere as the probe fell,
image close- and long-range targets on the surface, and a general characterization
of the Martian environment for later exploration. Useful science of Mars was
conducted until September 27, 1997, when communication from the lander stopped. After
one of the airbags had been cleared, ramps were deployed, and the less than 1
m-long rover - which had been stored against one of the petals - rolled onto
the Martian surface on July 6 at 05:40 UT, becoming the first rover on Mars.
The rover's name, Sojourner, was given by then 13-year-old Valerie A. of Bridgeport,
Connecticut, in early 1996, in a contest that had been sponsored by
After
one of the airbags had been cleared, ramps were deployed, and the less than 1
m-long rover - which had been stored against one of the petals - rolled onto
the Martian surface on July 6 at 05:40 UT, becoming the first rover on Mars.
The rover's name, Sojourner, was given by then 13-year-old Valerie A. of Bridgeport,
Connecticut, in early 1996, in a contest that had been sponsored by  The
Mars Pathfinder Lander camera is a side-by-side charged-coupled device (CCD)
stereo imager in a barrel-shaped housing which sits on top of an extendable mast
that stretches 62 cm above its stowed position upon deployment and approximately
150 cm above the surface. There are two 12-position color filter wheels, one
in each path of the stereo system. The camera is fully controllable in both elevation
and side-to-side (azimuth) motion by stepper motors with gear heads which provide
a field 178° in azimuth and +83° to -72° in elevation. The optics
do not require active focusing. The field of view for each eye is 14.4° by
14.0° and the resolution is 0.6 mm near the lander. The imager is f/18 with
a focal length of 2.3 cm. The best focus of the camera is at 1.3 m, the depth
of field ranges from 0.5 m to infinity.
The
Mars Pathfinder Lander camera is a side-by-side charged-coupled device (CCD)
stereo imager in a barrel-shaped housing which sits on top of an extendable mast
that stretches 62 cm above its stowed position upon deployment and approximately
150 cm above the surface. There are two 12-position color filter wheels, one
in each path of the stereo system. The camera is fully controllable in both elevation
and side-to-side (azimuth) motion by stepper motors with gear heads which provide
a field 178° in azimuth and +83° to -72° in elevation. The optics
do not require active focusing. The field of view for each eye is 14.4° by
14.0° and the resolution is 0.6 mm near the lander. The imager is f/18 with
a focal length of 2.3 cm. The best focus of the camera is at 1.3 m, the depth
of field ranges from 0.5 m to infinity.